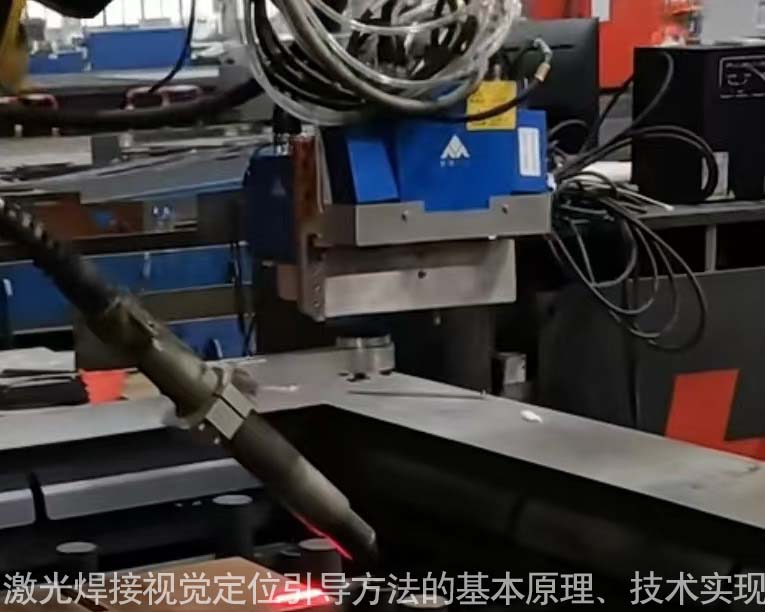
焊接机器人如何复制焊接程序以满足不同工件的焊接需求
焊接机器人在现代制造业中扮演着越来越重要的角色,它们不仅提高了生产效率,还提升了焊接质量。当面对大量重复或类似的焊接任务时,复制焊接程序能显著提高工作效率。下面将详细介绍焊接机器人如何复制焊接程序。 一、焊接程序的基本构成 焊接程序通常包括焊接路径、焊接参数(如电流、电压、速度等)、起始和结束位置、焊接顺序等信息。这些信息可以通过编程软件输入到焊接机器人中,或通过示教器手动示教。 二、编程方式 离线编程: 离线编程是指在计算机上使用专用的编程软件创建和编辑焊接程序,然后将其上传到焊接机器人控制器中。这种方法的优势在于可以在不占用机器人实际生产时间的情况下完成编程工作,提高了生产效率。此外,通过激光焊缝跟踪系统可以提前检测并优化焊接路径,减少了现场调试的时间。 在线编程(示教编程): 在线编程则是通过操作示教器,让机器人在实际焊接环境中进行示教。操作员手动引导机器人沿着预定的焊接路径移动,并记录下每个关键点的位置和焊接参数。在线编程的优点是直观,易于操作,适用于较复杂的焊接任务。 三、焊接程序的复制步骤 导出焊接程序: 需要将已经编写好的焊接程序从机器人控制器中导出。导出文件通常以特定的格式保存,例如XML、CSV等。这些文件包含了焊接路径和相关的焊接参数。 编辑和优化焊接程序: 导出的焊接程序可以在计算机上进行编辑和优化。使用专业的编程软件可以对焊接路径进行微调,修改焊接参数,以适应不同的工件或焊接要求。 导入焊接程序: 优化后的焊接程序需要重新导入到目标机器人的控制器中。导入过程中需要注意程序格式的兼容性,以确保机器人能够正确识别和执行。 验证和调试: 焊接程序导入后,需要在实际的焊接环境中进行验证和调试。操作员可以通过示教器或控制面板对焊接路径进行微调,确保焊接质量达到要求。在这一过程中,激光焊缝跟踪系统可以实时监控和调整焊接路径,确保焊缝的精准性和一致性。 四、激光焊缝跟踪系统的应用 激光焊缝跟踪系统是一种先进的焊接辅助设备,它通过激光传感器实时扫描焊接区域,检测焊缝的位置和形状,并将数据反馈给焊接机器人。根据反馈信息,焊接机器人可以实时调整焊接路径和参数,确保焊缝的质量和一致性,显著缩短调试时间,提高生产效率。 复制焊接程序是焊接机器人编程中的一个重要环节。通过正确的复制和验证,我们可以快速、准确地完成大量重复或类似的焊接任务,提高生产效率和质量。通过引入激光焊缝跟踪系统,不仅可以提高焊接机器人的工作效率,还能显著提升焊接质量,确保焊缝的精度和一致性。激光焊缝跟踪系统的应用,使得焊接程序的复制和优化更加高效和精准,满足不同工件的焊接需求。【华东】朱工:18168482081 【华中】夏工:18511589958 【华北】钊工:18552907035 【西南】付工:15902859219 【东北】卢工: 13141740270
地址: 北京,南京,佛山
![]()
敏越科技
让机器更智能
ENGLISH