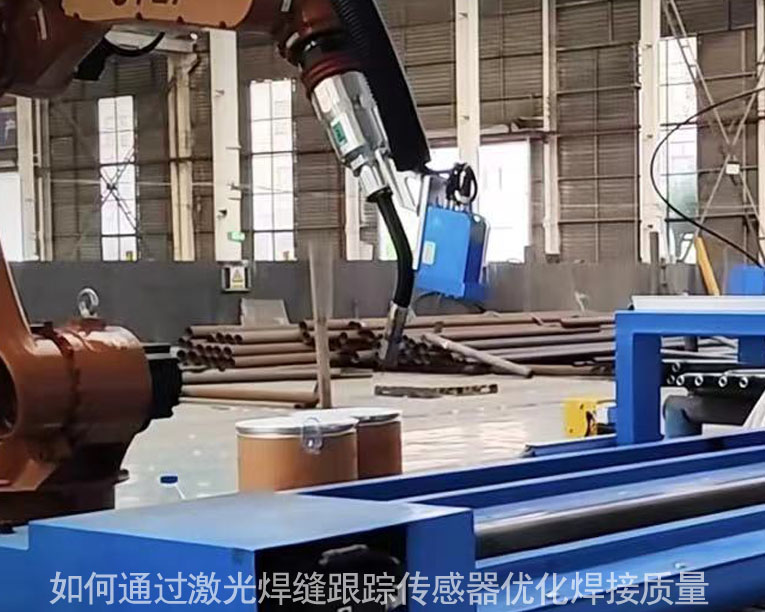
机器人专用激光焊缝跟踪器可实现与机器人控制系统实时通讯
激光焊缝跟踪传感器主要用于平面、曲面、圆周焊缝的跟踪,抗干扰,耐弧光,适合各种机器人运动机构,实时焊缝跟踪,高精度缝隙识别,配有强大的软件,支持多种焊接类型,焊缝形状实时显示。 自动化机器人焊接过程中会出现工件夹偏、钣金件热变形、机器人焊接后再进行人工补焊等情况频繁发生,非但没有节省人工成本而且增长了产品返修率。 自动化机器人专用激光焊缝跟踪器,可实现与机器人控制系统实时通讯跟踪焊缝进行焊接,为机器人装上眼睛,不仅可以解决上述难题,而且还根治盲焊机器人的通病。 自动化机器人焊缝跟踪系统应用于箱体焊接,同一批工件示教一次即可连续焊接,焊缝跟踪可以弥补装配精度误差和工件加工误差。 传统的钢瓶生产过程,需要人工全程手动控制,效率低下,而且操作者的眼睛常年看着弧光会受到不同程度的影响。 自动化机器人焊接过程中会出现工件夹偏、钣金件热变形、机器人焊接后再进行人工补焊等情况频繁发生,非但没有节省人工成本而且增长了产品返修率。 自动化机器人专用激光焊缝跟踪器,可实现与机器人控制系统实时通讯跟踪焊缝进行焊接,为机器人装上眼睛,实时焊缝跟踪寻位不仅可以解决上述难题。 所谓焊缝跟踪就是在焊接时实时检测出焊缝的偏差,并调整焊接路径和焊接参数,保证焊接质量的可靠性。由于工件的加工误差(工件间的尺寸差异、坡口的准备情况等)、装夹精度以及焊接时的热变形等因素的存在,以示教-再现方式工作的弧焊机器人在焊接时常常因为焊缝和示教轨迹有偏差而导致焊接质量下降。所以焊缝跟踪是保证弧焊机器人焊接质量的一个重要的方面。在机器人弧焊所使用的传感器中,激光焊缝跟踪传感器和视觉传感器占有突出位置,其中激光焊缝跟踪传感器用得最多。 激光焊缝跟踪传感器是一种指南,通过激光束和照相机的组合,可以记录焊接过程,跟踪其轨迹,并在必要时进行实时校正。 基于三角测量原理,传感器内部的激光二极管会产生光线,这些光线投射在要焊接的零件上,然后由照相机进行处理。 然后,系统解释该数据并将位置信息发送到运动系统。【华东】俞工:13515556167 【华中】夏工:18511589958 【华北】钊工:18552907035 【西南】付工:15902859219 【东北】孙工:15862217721
地址: 北京,南京,佛山
![]()
敏越科技
让机器更智能
ENGLISH