

项目描述
某矿山机械生产厂商,面对异形钢板需要开坡口时采用人工火焰切割的传统方式。为提高生产效率、提升工序质量、节约人力成本,升级为机器人坡口切割工作站。此工作站功能需求如下:采用等离子切割、能适应250—2500mm异形工件,无需工件精确机械定位。针对以上需求,采用ABB 6640机器人携切割枪及双目视觉定位相结合的新型坡口切割工作站。

图. 整体工作站
项目应用分析
1. 2500mm宽的工件开坡口,经分析需要用ABB 2750mm臂展机器人。

2. 采用更为高效的等离子切割方式,出于节省维护成本及简易应用考虑,继续采用企业自身使用的林肯等离子切割机。

3. 无需工件精确机械定位。采用敏越自主研发的双目视觉定位系统SmartVision WR。能对工件进行三维扫描定位,定位精度0.5mm。
应用亮点
1. 敏越双目视觉三维寻位功能的应用,解决了企业坡口切割工序工件定位的精度和效率问题,极大的改善坡口切割质量,为后续自动化焊接质量的一致性提供了良好的保障。
2. 双目视觉结构光设计,可适应车间不同时段不同环境光的干扰。
3. 多工件同时扫描,智能定位,实现小工件批量切割。

图. 多工件扫描数据
4. 输出高质量工件三维数据,友好的图形界面,让应用更加简洁易使用。
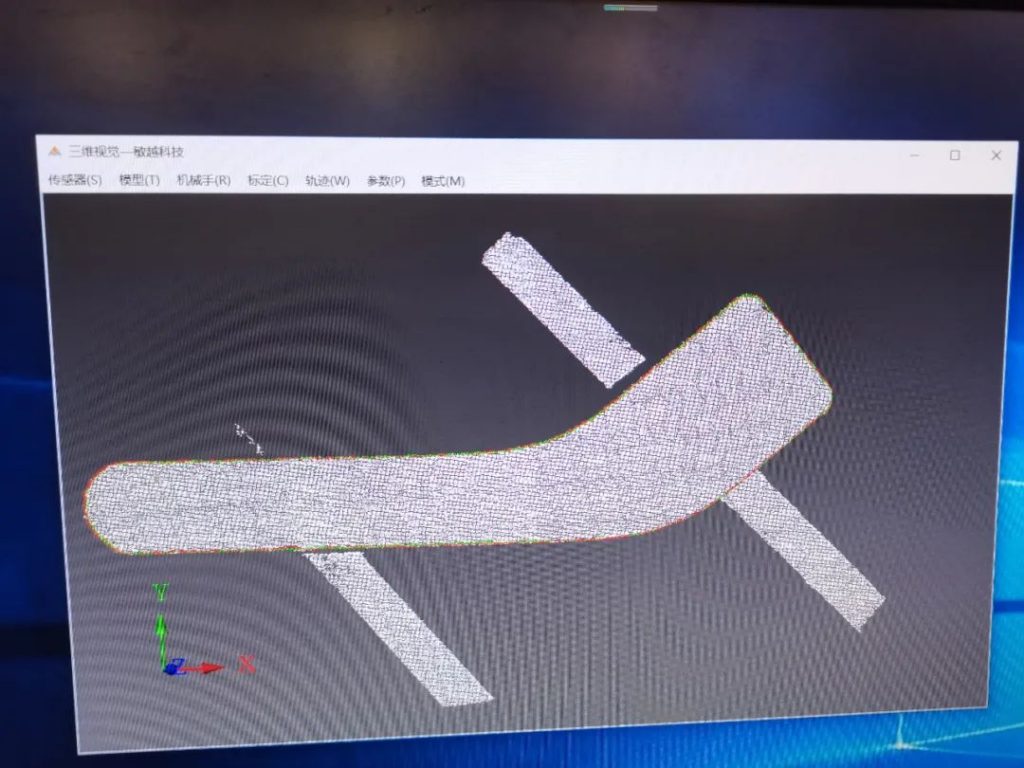
图. 整体扫描三维数据
切割效果








