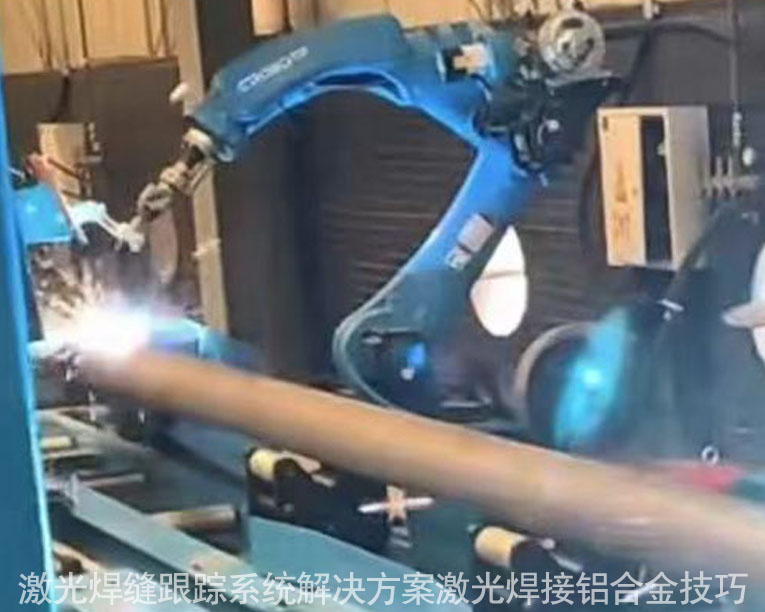
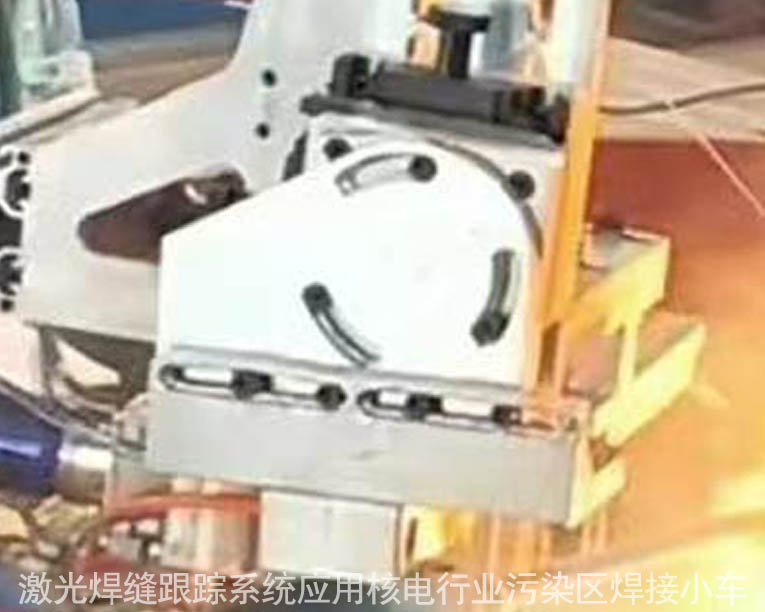
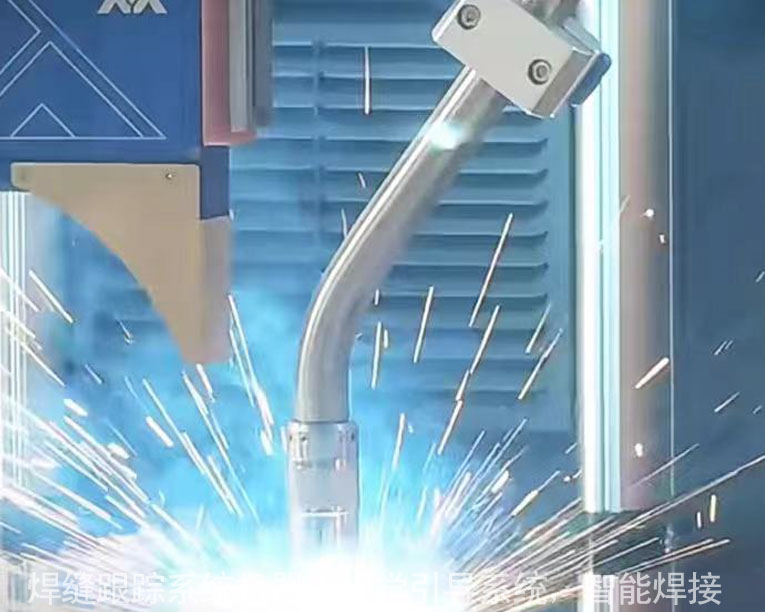
焊缝跟踪系统机器人视觉引导系统,实现智能焊接,提高鲁棒性 焊缝跟踪系统机器人视觉引导系统是现代工业生产中应用广泛的一种自动化设备。它通过使用先进的机器视觉技术,能够对工件进行高精度的定位和焊接操作,从而提高产品的质量和生产效率。 传统的焊缝跟踪系统通常采用人工操作的方式来完成焊接任务, 但这种方式存在许多问题。首先,由于人工操作的不确定性和误差,容易导致焊接质量不稳定。其次,人工操作需要耗费大量的时间和精力,无法适应大规模的生产需求。最后,随着生产规模的扩大,人工操作难以满足高精度和高效率的要求。 为了解决这些问题,近年来出现了焊缝跟踪系统机器人视觉引导系统。这种系统利用机器视觉技术和自主导航算法,实现了智能化的焊接过程。通过实时监测和控制焊缝的位置和姿态,机器人可以准确地引导焊接头进行精确的移动和调整,确保了焊接的质量和一致性。同时,机器人还可以根据工件的特点和环境条件进行灵活的调整和控制,提高了系统的鲁棒性和适应性。 在实际应用中,焊缝跟踪系统机器人视觉引导系统具有广泛的应用前景。例如,在汽车制造、航空航天等领域,焊缝跟踪系统机器人视觉引导系统可以帮助实现高质量、高效率的焊接生产。此外,该系统还可以在医疗器械、电子产品等行业中得到广泛应用,为产品制造提供更加精准和可靠的解决方案。 然而,要实现焊缝跟踪系统机器人视觉引导系统的全面应用,仍需进一步的研究和改进。其中,如何提高系统的精度和鲁棒性是一个关键的问题。目前,一些研究团队正在探索新的机器视觉算法和技术,以提高焊缝跟踪系统的定位能力和稳定性。同时,还需要加强对环境因素的影响和干扰的识别与处理,以应对复杂的工作环境和条件。只有不断创新和发展,焊缝跟踪系统机器人视觉引导系统才能更好地服务于工业生产和人类社会的发展。 焊缝跟踪系统机器人视觉引导系统是一种高效、精确的自动化焊接设备,通过使用先进的机器视觉技术来实现智能化焊接。这种系统能够实时地对焊缝进行定位和跟踪,提高焊接质量和生产效率。 焊缝跟踪系统机器人视觉引导系统则可以解决那些些问题? 一.该系统采用了高精度的摄像头和传感器来捕捉图像并识别焊缝的位置。这些摄像头可以提供清晰、稳定的图像,使得机器视觉算法更容易准确地检测出焊缝的位置。同时,传感器可以帮助机器人感知周围的环境,避免与障碍物发生碰撞或误判。 二.焊缝跟踪系统机器人视觉引导系统采用了一种名为“目标追踪”的技术,用于实时跟踪焊缝的运动轨迹。该技术基于计算机视觉原理,通过对焊缝的像素点进行匹配和分析,确定其位置和运动方向。这样一来,机器人可以根据目标追踪的结果,精确地控制焊枪的位置和运动,确保每一条焊缝都能被正确连接起来。 三.为了进一步提高系统的精度和鲁棒性,焊缝跟踪系统机器人视觉引导系统还引入了多种算法和技术。例如,深度学习算法可以通过训练模型来自动调整参数,以适应不同的环境和工件形状;而图像处理技术则可以处理复杂的图像数据,减少噪声干扰和提高算法的稳定性。 综上所述,焊缝跟踪系统机器人视觉引导系统在实现智能焊接方面具有巨大的潜力。它不仅提高了焊接的质量和效率,而且减少了人工干预的需求,降低了生产成本。随着技术的不断进步和发展,相信未来会有更多的应用场景出现,推动工业自动化的进程。
【华东】王工:18751664051 【华中】夏工:18511589958 【华北】钊工:18552907035 【西南】付工:15902859219 【东北】孙工:15862217721
地址: 北京,南京,佛山

![]()
敏越科技
让机器更智能
ENGLISH