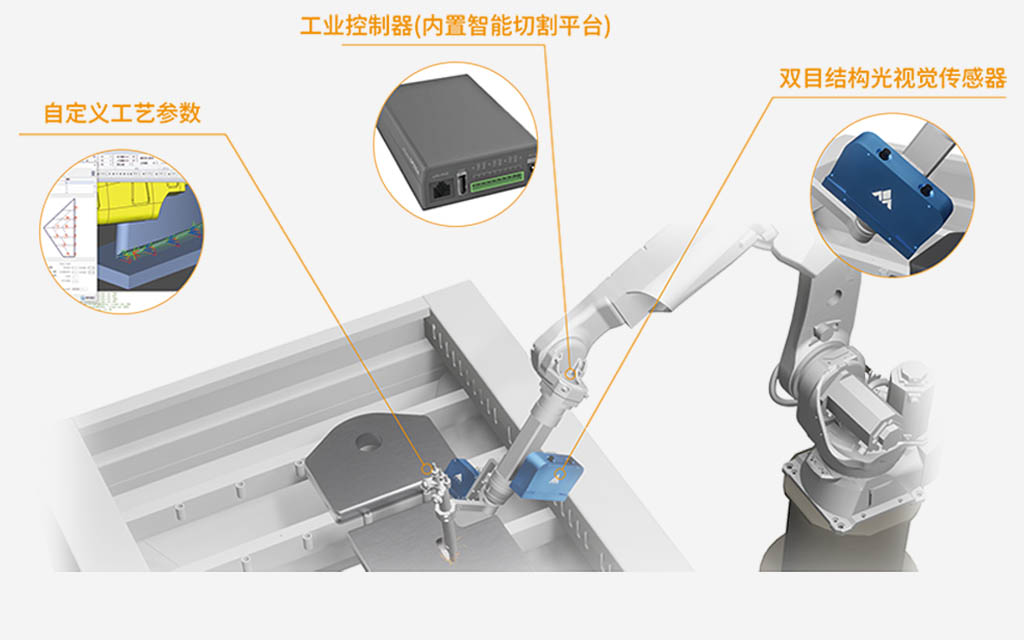
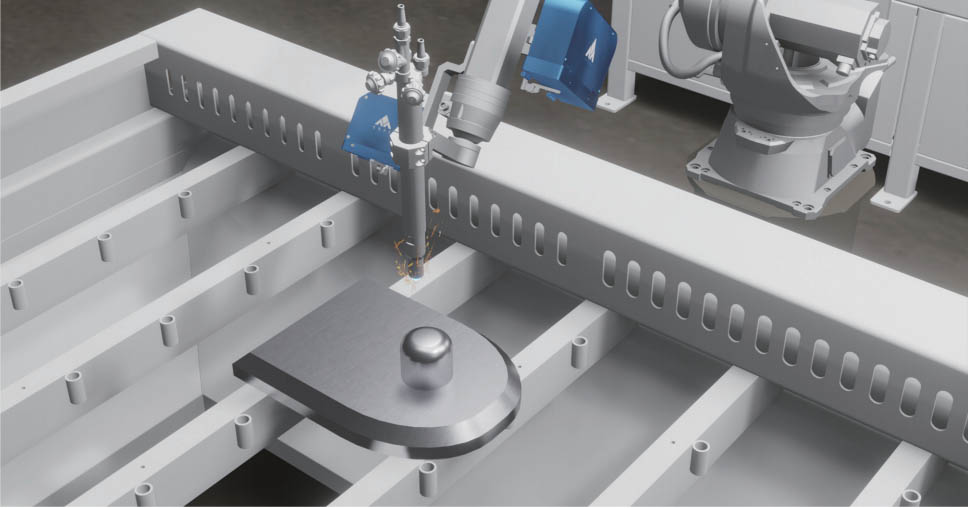
Smartcut 智能坡口切割工作站,产品依托敏越在CAD/ CAM、机器人学和3D视觉、人工智能等方面的多 年积累,在敏越已有的自研成熱的智能决策系统RobotSmart和3D视觉传感器的基础上,推出基于模型驱动和视觉传感器的免示教自动编程方法,实现机器人切割的“自动驾驶” ,解决传统工业机器人坡口切割中的各种问题。整套系统由工业机械臂、双目结构光视觉传感器、工业控制器 (内置RobotSmart智能切割软件) 切割配件三部分构成。
Smartcut 智能坡口切割工作站
Smartcut产品特点
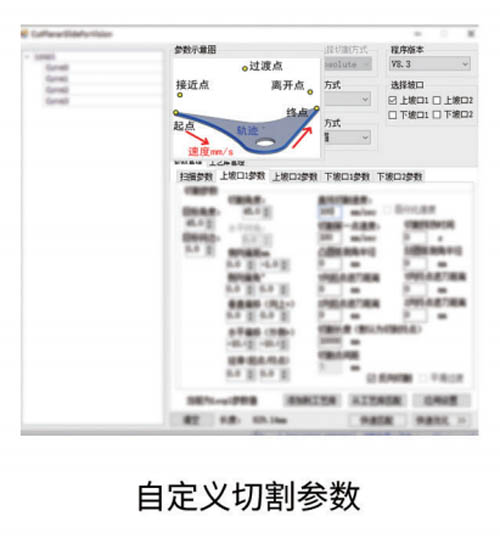
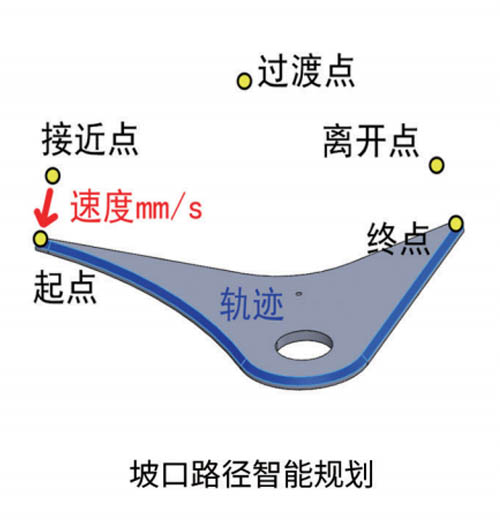
在切割前,利用工件数模,对机器人轨迹行规划。通过模型标注和自动提取,确定各部分对应的工艺。 然而数模和实际工作站存在差异,包括模型和实际工件偏差、坡口切割过程中的变形。对于这一问题,采用不同量程的三维视觉传感器对轨迹进行粗定位和精定位。
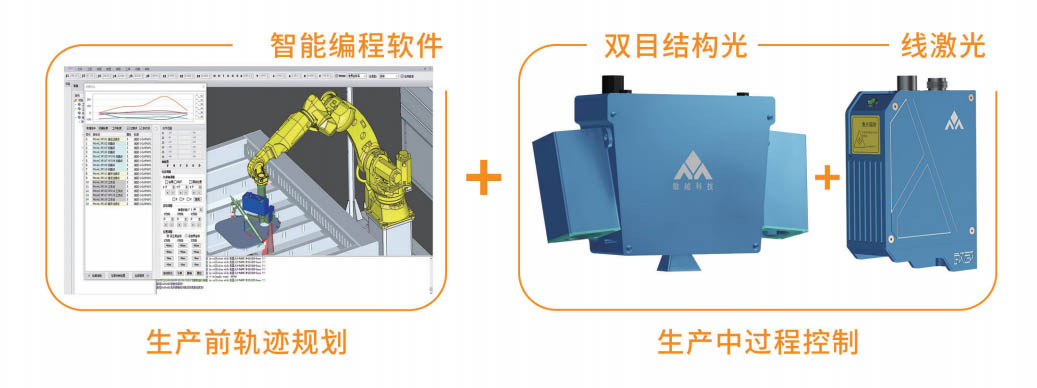
通过不同传感器的组合使用,可以满足大范围编程 (大于200mm)和高精度(小于0.1mm)轨迹补偿的要求。方案通用性强,生产过程中无需人为干预,数模和传感器实测数据结合提高了生产过程的可靠性。其中,编程采用三维智能机器人编程软件RobotSmart实现,坡口切割由SmartVison视觉系统实现轨迹和工艺 控制。
3D视觉系统
敏越科技自主研发的3D结构光相机,专门针对工业机器人坡口切割应用场景。目前视觉产品已经推出多种型号,满足不同场景中抗环境光、高精度、小体积等多样化需求。通过智能双目视觉系统对三维工件进行定位省去了高精度、复杂和昂贵的工装,实现柔性化生产的目的。
区别于通常将3D相机固定的配置方式,Smartcut 将3D相机置于机械臂末端,可以满足客户在复杂环境 80m下的上下料需求避免的上下料设备气相机固定支架碰撞的风险,使得配置更加简单方面。同时在面对多工位场景的时候,可以降低相机安装数量大大降低系统成本。

Robotsmart 智能切割软件
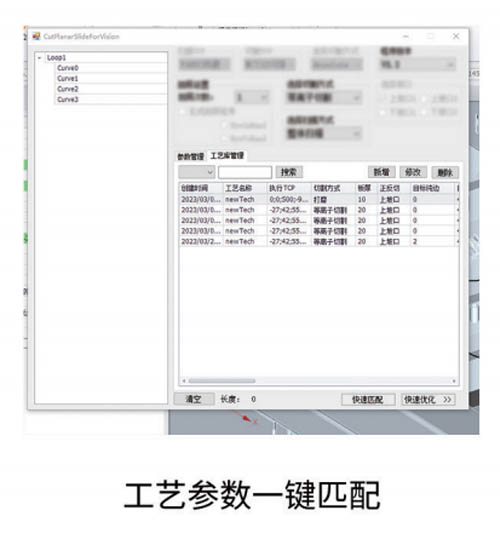
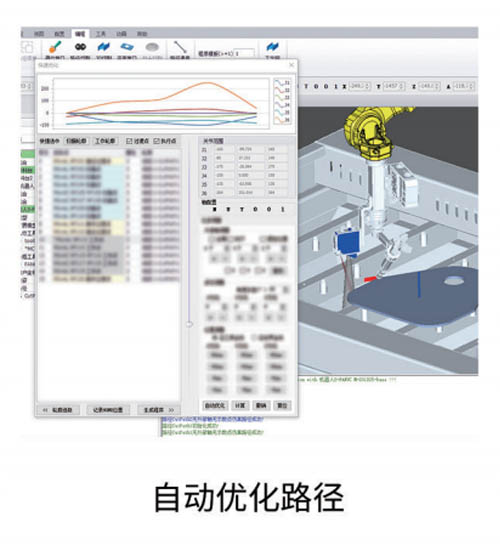
Smartcut智能坡口切割工作站,内置Robot Smart智能切割系统,能够快速生成机器人运动轨迹,有效 解決切割轨迹示教复杂、编程效率低、机器人利用率低等现场应用问题。满足了了机器人坡口切割多品种、 小批量、柔性化的生产需求。
敏越智能切割软件- Robotsmart能快速生成机器人运动轨迹,有效解决焊接轨迹示教复杂、编程效率低 机器人利用率低等现场编程问题。
敏越智能切割软件- Robotsmart能快速生成机器人运动轨迹,有效解决焊接轨迹示教复杂、编程效率低 机器人利用率低等现场编程问题。
软件功能
软件特色

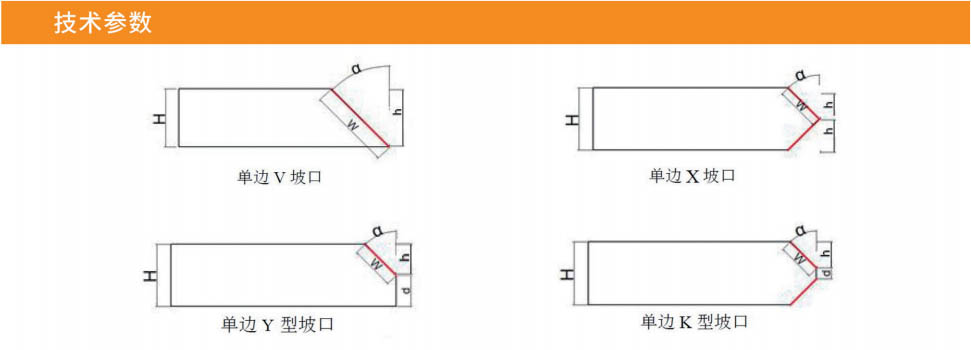
配置单与技术参数

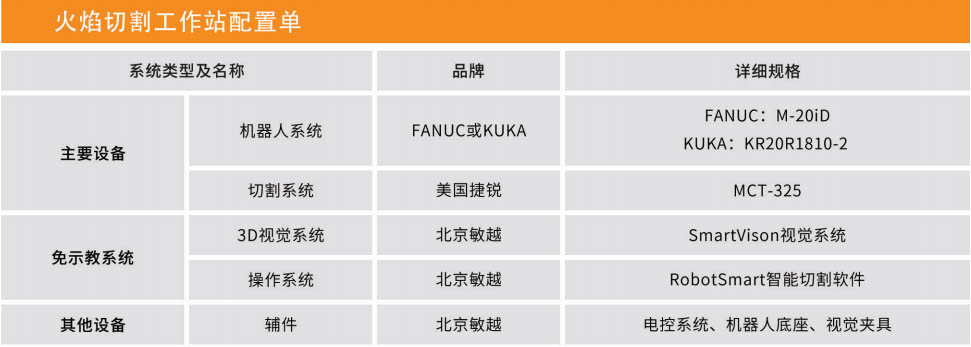

切割工作站配置根据不同需求选择,切割工装平台、安全围栏等设备需客户自备。
注:此技术参数以列举设备作为参考值,具体参数根据最终设备选型对应调整

Smartcut案例实拍

smartcut智能坡口切割工作站实现了“免示教+视觉” 的智能化作业模式,已在多个行业落地应用,帮助各大厂家解决了编程难度大、智能化水平低下的生产痛点,同时满足对小批量、不同型号工件的切割生产 要求,提高加工效率和成品率。